[2]. - Polygon data are from BodyParts3D[1], CC BY-SA 2.1 jp, https://commons.wikimedia.org/w/index.php?curid=32490636")
 [CC BY-SA 2.1 jp (https://creativecommons.org/licenses/by-sa/2.1/jp/deed.en)], via Wikimedia Commons")
Motorische voorbereiding is een fascinerende cognitieve functie, en meerdere kenmerken ervan zijn relevant voor de wijze waarop een fietser door de bocht stuurt:
- Motorische voorbereiding is uitgestelde beweging
- Motorische voorbereiding is zowel overt als covert
- Motorische voorbereiding kan geautomatiseerd worden
Deze drie eigenschappen worden nu meer uitgebreid besproken.
1. Motorische voorbereiding is uitgestelde beweging
In veel situaties zijn waarnemen en bewegen zeer nauw met elkaar verweven. Dat is erg duidelijk als we het overeind blijven bestuderen, vooral bij lage snelheid: ons evenwichtsorgaan kan kleine afwijkingen van de evenwichtstoestand (recht overeind) detecteren en een beweging (stuurimpuls of gewichtsverplaatsing) initiëren die het evenwicht herstelt. Ook bij motorische voorbereiding zijn waarnemen en bewegen aan elkaar gekoppeld, maar hier zijn ze in de tijd meer van elkaar gescheiden. Dit is een belangrijk verschil tussen overeind blijven en sturen: bij het sturen nemen we eerst het toekomstige traject waar, bereiden op basis daarvan onze bewegingen voor, en voeren ze tenslotte uit. Dus, waar bij het overeind blijven waarnemen en bewegen elkaar vrijwel onmiddellijk opvolgen, gaat bij het sturen waarnemen duidelijk vooraf aan bewegen. Daarom kunnen we motorische voorbereiding opvatten als uitgestelde beweging of, anders geformuleerd, als een bewegingsplan. Bij het overeind blijven is er geen duidelijk plan; voor je het weet is een onevenwicht al gecorrigeerd. Het tijdsverschil tussen waarnemen en bewegen wordt mogelijk gemaakt door het feit dat de neuronale circuits in de prefrontale cortex actief kunnen blijven zonder sensorische input; een motorisch programma dat is klaargezet heeft geen nieuwe sensorische input nodig om die activiteit te behouden.

In het meest extreme geval is het mogelijk om waarnemen en bewegen volledig los te koppelen. Bijvoorbeeld, een medepassagier in een auto kan meekijken met de bestuurder, en hem helpen bij het navigeren (“Hier moet je naar links!”). Het kunnen loskoppelen van waarneming en beweging is een uniek kenmerk van de cognitieve vermogens van primaten (mensen en apen). De reactie van lagere diersoorten op een stimulus is meestal onmiddellijk en stereotiep. Primaten, daarentegen, kunnen hun reactie uitstellen, en dat creëert tijd om gedrag mede te baseren op interne factoren, meestal aangeduid als afwegen, plannen, evalueren, etc.
2. Motorische voorbereiding is zowel overt als covert
“Overt” betekent “zichtbaar” en “covert” betekent “verborgen”. Het overte (zichtbare) aspect van motorische voorbereiding bij het sturen is het feit dat de fietser kijkt in de richting van zijn bewegingsdoel (een plaats op zijn toekomstige traject). Kijken in de richting van een bewegingsdoel draagt bij aan de accuraatheid van de waarneming, want het zorgt ervoor dat het bewegingsdoel in het foveale (meest accurate) deel van het gezichtsveld valt. Het coverte (verborgen) aspect van motorische voorbereiding bij het sturen is het feit dat de fietser zijn toekomstige beweging kan klaarzetten zonder dat hij hem onmiddellijk moet uitvoeren. Daarom kun je als observator niet aan een fietser zien of hij zich voorbereid heeft op een toekomstige bocht. Je kunt dat alleen beoordelen op het moment dat hij de bocht instuurt: als hij te laat instuurt, dan heeft hij zich onvoldoende voorbereid.
3. Motorische voorbereiding kan geautomatiseerd worden
Strikt genomen, is motorische voorbereiding geen motorische vaardigheid, want tijdens de voorbereiding wordt er niet bewogen. Dit is een belangrijk verschil met het overeind blijven, wat wél een typische motorische vaardigheid is. De kern van een motorische vaardigheid is het koppelen van specifieke waarnemingen aan specifieke bewegingen. Bij het overeind blijven, hebben die waarnemingen betrekking op ons evenwicht (zoals geregistreerd door ons evenwichtsorgaan), de positie van onze gewrichten, en de spanning van onze spieren (zoals geregistreerd door onze proprioceptie). Deze koppelingen kunnen geautomatiseerd worden, en het cerebellum speelt hierbij een cruciale rol.
Een belangrijke vraag is of het ook mogelijk is om ook motorische voorbereiding te automatiseren. Deze vraag is niet onmiddellijk te beantwoorden, en wel om de volgende redenen:
- Motorische voorbereiding is geen beweging maar een bewegingsplan, en dit is omdat er een tijdsverschil is tussen de waarneming van een bewegingsdoel en de beweging.
- Motorische voorbereiding is een functie van de prefrontale cortex, en die is niet rechtstreeks met de spieren verbonden. Dus, het automatiseren van motorische voorbereidng wordt niet gerealiseerd door waarnemingen en bewegingen aan elkaar te koppelen, maar waarnemingen en een bewegingsplan.
- De waarnemingen die gekoppeld moeten worden aan het bewegingsplan zijn vooral visueel en niet vestibulair en proprioceptief, zoals bij het overeind blijven. De vestibulaire en de proprioceptieve input wordt alleen gegenereerd tijdens de beweging, en relevante visuele input is reeds beschikbaar voordat de beweging ingezet wordt.
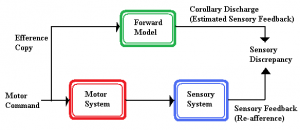
Onze kennis van het cerebellum suggereert sterk dat ook motorische voorbereiding te automatiseren is. Immers, er bestaat een netwerk van neuronale verbindingen dat nodig is om motorische voorbereiding op dezelfde manier te automatiseren als het overeind blijven. Dit kunnen we uitleggen aan de hand van het schema hiernaast. Het automatiseren van het overeind blijven vertrekt van een signaal (“Motor Command”) van de primaire motor cortex dat de spieren aanstuurt (“Motor System”) en een kopie van dit signaal (“Efference Copy”) naar het cerebellum (“Forward Model”) stuurt. Het automatiseren van motorische voorbereiding, daarentegen, vertrekt van een signaal (“Motor Command”) van de prefrontale cortex dat de primaire motor cortex aanstuurt (“Motor System”) en eveneens een kopie van dit signaal (“Efference Copy”) naar het cerebellum stuurt. De neuronale verbindingen die nodig zijn om deze efferente kopieën naar het cerebellum te sturen, zijn er niet alleen voor de primaire motor cortex (automatisering van het overeind blijven) maar ook voor de prefrontale cortex (automatisering van motor voorbereiding). Die laatste verbindingen (van de prefrontale cortex naar het cerebellum) zijn er echter alleen bij primaten.
Het cerebellum stuurt de primaire motor en de prefrontale cortex aan o.b.v. het verschil tussen waargenomen en voorspelde zintuiglijke feedback (“Sensory Feedback”). Voor het overeind blijven komt de relevante feedback van ons evenwichtsorgaan en onze proprioceptie, en hij bevat informatie over ons evenwicht (vestibulair), de positie van onze gewrichten en de spanning van onze spieren (proprioceptief). Voor motorische voorbereiding is de relevante feedback visueel, maar is het niet geheel duidelijk hoe die informatie eruit ziet. Hier bereiken we de grenzen van onze huidige wetenschappelijk kennis. Uit onderzoek met lagere diersoorten hebben we veel geleerd over de neuronale verbindingen tussen de primaire motor cortex en het cerebellum. Om meer te leren over de neuronale verbindingen tussen de prefrontale cortex en het cerebellum zijn we afhankelijk van onderzoek met primaten, en dat onderzoek verloopt veel trager.
Tot besluit, het is zeer aannemelijk dat motorische voorbereiding geautomatiseerd kan worden, net zoals dat ook kan voor het overeind blijven. De cruciale wetenschappelijke kennis die tot deze conclusie leidt is het feit dat de prefrontale cortex (nodig voor motorische voorbereiding) op dezelfde manier verbonden is met het cerebellum als de motor cortex (nodig voor het overeind blijven). Dit is positief nieuws voor de fietsers die hun fietsvaardigheid willen verbeteren. Deze verbetering is dus te realiseren voor beide vaardigheden: overeind blijven en motorische voorbereiding. Door motorische voorbereiding te oefenen, leert de fietser meer automatisch te sturen, zodat hij zijn aandacht meer kan inzetten voor het opmerken van gevaar, en het vermijden ervan.